Para peneliti dari École polytechnique fédérale de Lausanne (EPFL) di Swiss telah mengembangkan tangan artikulasi yang dapat memperluas jangkauan lengan robot dengan melepaskan dan merangkak sendiri untuk mengambil sesuatu. Penelitian tersebut baru-baru ini dipresentasikan di Konferensi Internasional tentang Robotika dan Otomasi (ICRA) dan dulu terlihat oleh Spektrum IEEE majalah.
Karena kekuatan dan kecepatannya, lengan robot biasanya dipasang secara permanen ke lantai atau struktur lain untuk menambah stabilitas, sehingga membatasi jangkauannya. Tujuan dari penelitian yang dilakukan di EPFL’s Laboratorium Algoritma dan Sistem Pembelajaran (LASA), akan mengembangkan tangan robot bimodal dengan kemampuan menggenggam yang diperluas, termasuk kemandirian sesekali dari lengan robot yang terpasang padanya.

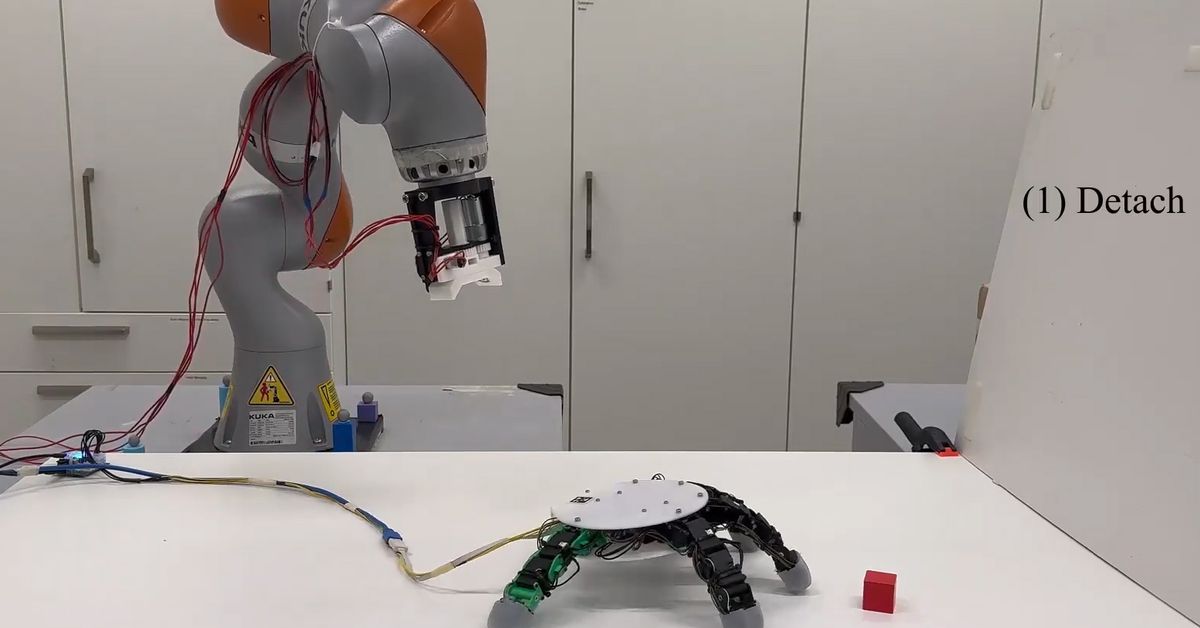
:no_upscale():format(webp)/cdn.vox-cdn.com/uploads/chorus_asset/file/25646109/robotarm2.gif)
GIF: YouTube
Tangan robot biasanya dirancang dengan satu tujuan: untuk memegang sesuatu. Untuk mengembangkan sesuatu yang bisa melakukan hal itu dan merangkak sendiri seperti Benda Keluarga Addams, para peneliti menghasilkan dan menyempurnakan desain dasar menggunakan algoritma genetika (yang mengandalkan trik biologis seperti seleksi alam dan evolusi) dan Simulator fisika MuJoCo untuk menguji kepraktisan iterasi.
Algoritme dan simulasi membantu para peneliti menentukan posisi optimal dan jumlah jari artikulasi yang dibutuhkan, yang ternyata berjumlah lima, dengan tata letak yang mirip dengan tangan manusia. Tangan robot ini juga menggunakan konektor magnet di pergelangan tangan, yang memungkinkannya dipasang dan dilepas dari lengan secara mandiri.
:no_upscale():format(webp)/cdn.vox-cdn.com/uploads/chorus_asset/file/25646096/robotarm.gif)
GIF: YouTube
Jari-jari tangan dapat menekuk ke dua arah, sehingga sebagian dapat digunakan untuk mengangkat benda sedangkan sisanya berfungsi sebagai kaki mungil. Desain ini juga memperluas kegunaan tangan saat dipasang pada lengan robot. Ia dapat mengangkat banyak objek sekaligus tanpa memutar lengan untuk mengatur ulang posisi jari yang tidak digunakan.
Tangannya juga jauh lebih kecil dari robot sejenisnya Tempat Dinamika Bostonyang dapat bergerak bebas dengan menggunakan empat kakinya. Spot sudah ditingkatkan dengan lengan robot dan penggenggamnya sendiri, namun dengan tangan artikulasi yang beroperasi secara independen, robot ini dapat lebih siap untuk menjelajahi atau menganalisis area yang tidak dapat dimasuki Spot.





